Filtering
Please Log In for full access to the web site.
Note that this link will take you to an external site (https://shimmer.mit.edu) to authenticate, and then you will be redirected back to this page.
Part 1
Consider a Linear Time Invariant (LTI) system (system 1), charactertized by a unit sample response h_1[\cdot]:
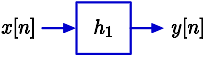
We know that when the input to this system is x[n]=\delta[n]+\delta[n+1], the output is given by:
For each of the input signals x_i[\cdot] below, find the corresponding output, specified by y_i[\cdot] or Y_i(\cdot):
Enter your answer as a Python expression, which can depend on pi, e, j, OMEGA, and/or delta(...)(to represent \delta[...] or \delta(...), depending on the context).
y_1[n]:

Y_2(\Omega):
Hint: The answer to this part can be written as a weighted sum of two
delta functions,where the weights are simple numerical constants
(not functions of \Omega).
Y_3(\Omega):
Part 2
Let H_2(\Omega) be the frequency response of another system (system 2), whose unit sample response is known to be:
And let H_3[k] be a sampled version of H_2(\cdot):
Compute the first four samples of h_3[\cdot], and enter your answer as a Python list (containing only single numbers) below:
Part 3
Consider a signal h_4[\cdot], whose DFT is related to H_4[\cdot]:
Compute the first four samples of h_4[\cdot], and enter your answer as a Python list (containing only single numbers) below:
Part 4
Finally, consider a new system h_5[\cdot], created by cascading two of system 2 as shown in the following diagram:

h_5[n]:pi, e, OMEGA, and/or delta(...)(to represent \delta[...]).
: